Team 03: Bryan Fink, Dan Roy, Matt Uhle
Here is a link to our original plan.
Here is the actual plan:
Our robot is designed to take a beating - at least in the front end. We designed the front as sort of a battering ram. It is very strong and braced as much as possible to the main body.
The gear train is built for speed. Its ratio is 1:45. In order to allow the robot to be fast and strong at the same time, we also used three motors to drive each wheel. The motor, gear, and wheel assemblies are all connected to each other in such a way as to prevent undue torque from weight on top of the robot from the battery pack and the handyboard.
The back end is designed to grab balls. A gate on each side (left and right) raises and lowers to trap a ball. A small wall on the outer side of these arm helps to keep the balls in our possession while maneuvering around the board. Bump sensors are mounted along the forward wall to detect when a ball is held, and color sensors are mounted on the gates to test the color of the balls. Each gate is controlled by a separate servo to allow independent gate control.
A caster was added in the back of the robot to aid in driving. We noticed that it was difficult to control each of the two wheels accurately enough to keep the robot going straight. The caster corrected this. We also made it servo-controlled to allow us to make turns more easily.
Sensors other than the gate sensors are:
|
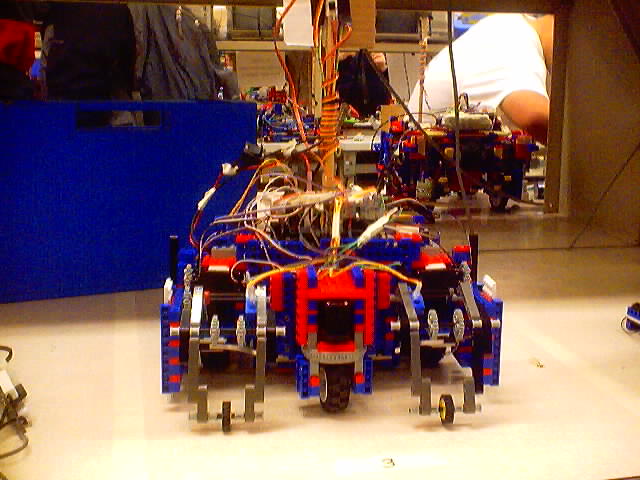
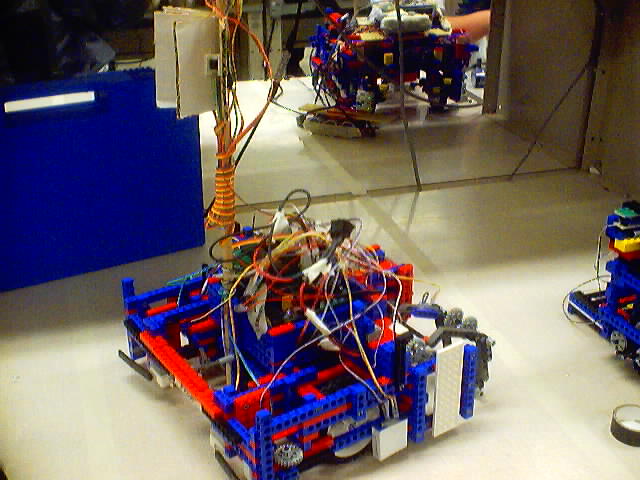
Here you can see the back side of the robot: ball gates on either side of the steering caster. | |
Here is a side view: you can see the sturdy front, the mess of wiring, and the IR sensors complete with fins to limit the field of view of each sensor. |